Highlights
- Extended EBS-EKF from brightness-only centroid correction to a speed-aware measurement model that shifts positive-event centroids along the image-plane motion direction.
- Integrated adaptive measurement covariance so fast-moving stars and weak centroid clusters contribute less aggressively to the weighted attitude update.
- Built on an event-tracking prototype with event batching, centroid extraction, blind astrometry initialization, and batchwise weighted Wahba attitude estimation.
- Validated the end-to-end module on a 3.0 s representative track with 372 event batches, about 8.7M events, and 38.3 average centroids per batch without adding measurable runtime cost.
Key metrics
Media
Tech stack
Problem and research gap
Star trackers estimate spacecraft attitude from observed star positions, which is critical for communication, Earth observation, and scientific pointing. Conventional APS star trackers are limited by exposure time and frame processing cadence, making rapid motion and high-frequency pointing harder to support.
Event-based cameras are attractive because they output sparse asynchronous brightness-change events at microsecond-scale temporal resolution. For sparse star fields, most pixels remain inactive, so the sensor can offer lower latency, lower data volume, reduced motion blur, and potentially lower power consumption.
The main challenge is measurement quality under low light. Existing EBS-EKF work uses a low-light event model, a magnitude-dependent centroid correction, and a 3D EKF. The remaining gap is that the centroid offset is treated as a fixed function of brightness, even though the offset should theoretically vary with image-plane star speed.
System overview
I kept the measurement-driven philosophy of EBS-EKF instead of replacing the tracker. The implemented prototype starts from a practical event-tracking baseline: accumulate event batches, extract star centroids, initialize the field with blind astrometry, and estimate attitude batch-by-batch through a weighted Wahba solve.
The speed-aware extension is inserted between centroid extraction and attitude update. For each tracked star, the prototype estimates image-plane velocity from consecutive batches, uses centroid event count as a brightness proxy, applies a speed-aware centroid correction, and computes adaptive measurement covariance before the attitude update.
Speed-aware measurement model
The measured centroid is treated as a biased observation rather than as a perfect star location. The correction shifts the centroid along normalized image-plane velocity using an offset function conditioned on brightness proxy and speed. In the prototype, centroid support count stands in for catalog magnitude while the full target method would use apparent magnitude and calibrated event-camera parameters.
The uncertainty model is adaptive: covariance increases when motion is fast or centroid support is weak. The intuition is that fast-moving stars and dimmer or weaker clusters should influence the attitude estimate less strongly than stable, well-supported measurements.
- Corrected centroid: measured centroid plus a motion-direction offset driven by brightness proxy and image-plane speed.
- Adaptive covariance: fast motion and weak centroid support increase measurement uncertainty.
- Weighted fusion: inverse-variance weights feed the weighted Wahba attitude update in the current prototype.
Evaluation setup
The project uses a staged evaluation plan. Synthetic trade-space scenarios generate controlled star-motion data for speed and brightness sweeps, helping calibrate the correction and debug failure modes before large real-data runs.
The real-data stage is designed around released EBS-EKF real-night-sky data, Earth-rotation-based validation, and public variable-speed slew observations. The current results are an initial ablation, not a final accuracy benchmark.
- Comparisons: current baseline, magnitude-only correction, and speed-aware prototype.
- Current metrics: RA/Dec/roll attitude behavior, mean and max latency, budget overruns, and centroids per batch.
- Target metrics: across/about attitude error when trusted reference solutions are available.
Preliminary results
On one representative 3.0 s track, both the baseline and speed-aware prototype processed 372 batches and approximately 8.7M events with the same average centroid count of 38.3 centroids per batch. This keeps the comparison focused on the measurement-model change rather than a different detection count.
The speed-aware prototype changed the estimated RA, Dec, and roll trajectories, showing that the new measurement layer is active end-to-end. Runtime stayed essentially the same: mean latency decreased from 8.47 ms to 8.17 ms, max latency decreased from 124.49 ms to 118.39 ms, and budget overruns decreased from 50 to 49.
These results support the engineering viability of the module, but they are intentionally framed as preliminary. A single track demonstrates integration and runtime feasibility; it does not yet prove consistent accuracy gains across regimes.
Engineering contribution
- Implemented a measurement-model upgrade that can be tested inside the existing event_explorer-style pipeline without first rebuilding a full asynchronous 3D EKF.
- Preserved astrometry and visualization tooling, making the prototype easier to debug and compare against the magnitude-only baseline.
- Designed the synthetic scenario workflow around speed, brightness, field density, sky location, focal length, detector thresholds, and motion-axis sweeps.
- Kept the algorithmic focus on low-SWaP constraints where measurement-model improvements are valuable because hardware, aperture, and compute budgets are limited.
Limitations and next steps
- Run the full synthetic trade-space sweep to calibrate the speed-aware correction across speed and brightness regimes.
- Evaluate paired baseline vs speed-aware runs across multiple real night-sky tracks instead of one representative sequence.
- Use Earth-rotation and public variable-speed observations for stronger validation and less reliance on a single reference tracker.
- Integrate the corrected measurements and adaptive covariance into a fuller asynchronous 3D EBS-EKF pipeline for continuous rotation and angular-velocity updates.
Related projects

OwnerPilot - AI Operating Copilot for SMB Owners
AI Product Engineering · 2026
Open-source decision intelligence platform that helps smaller business owners import records, track obligations, investigate cash and margin shifts, forecast scenarios, and execute evidence-backed operating actions.

Automated Goalie: Ping Pong Ball Trajectory Prediction System
Robotics · 2025
A closed-loop robot-learning prototype that detects a ping pong ball, estimates its 3D motion, predicts the landing point, and rotates a servo-driven blocker in real time on a Raspberry Pi-based hardware setup.
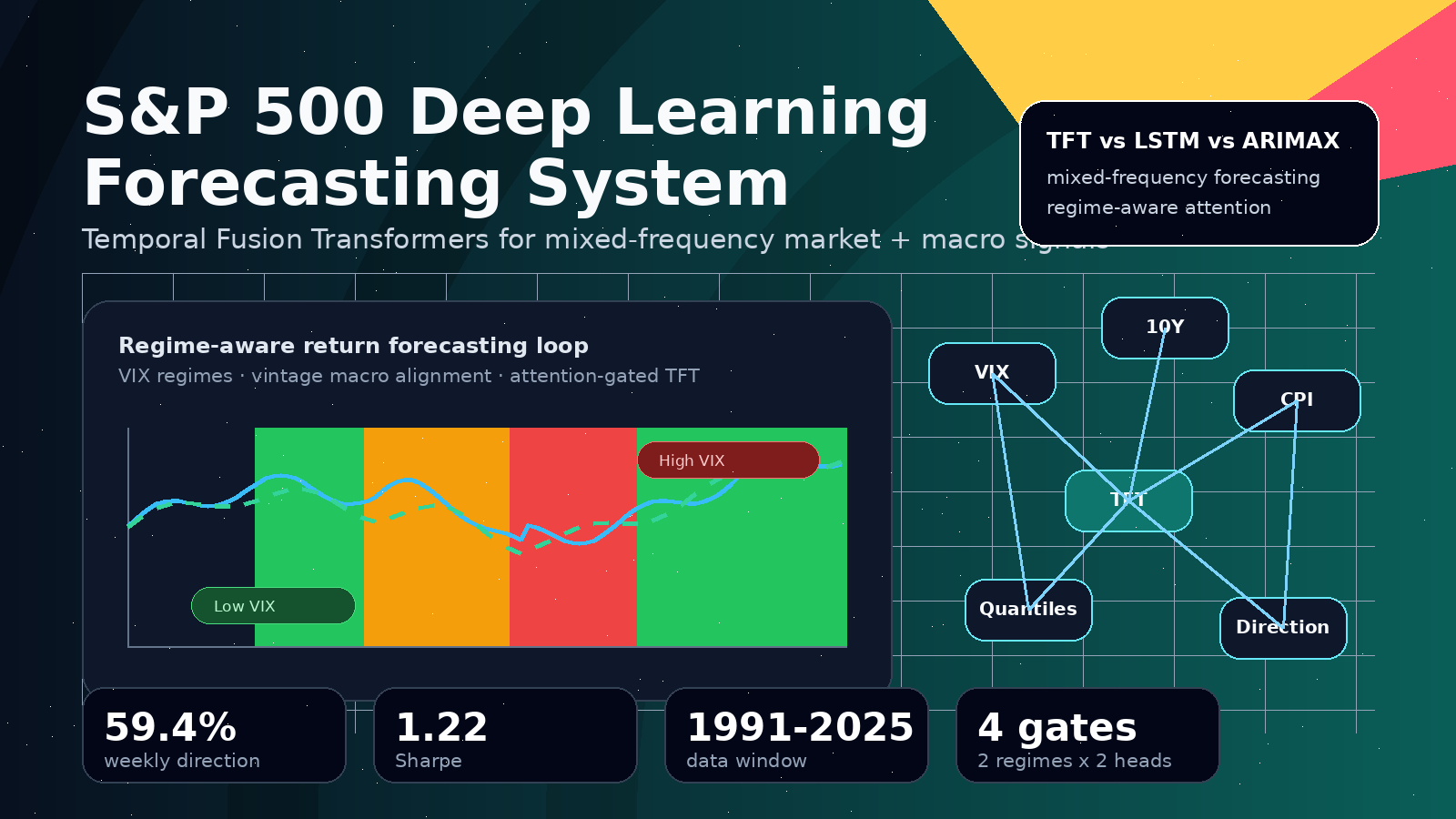
S&P 500 Deep Learning Forecasting System
Financial ML · 2025
A research-grade forecasting system that evaluates Temporal Fusion Transformers against LSTM and ARIMAX baselines for S&P 500 return prediction using mixed-frequency market and macroeconomic data, then extends TFT with regime-aware attention and interpretability diagnostics.
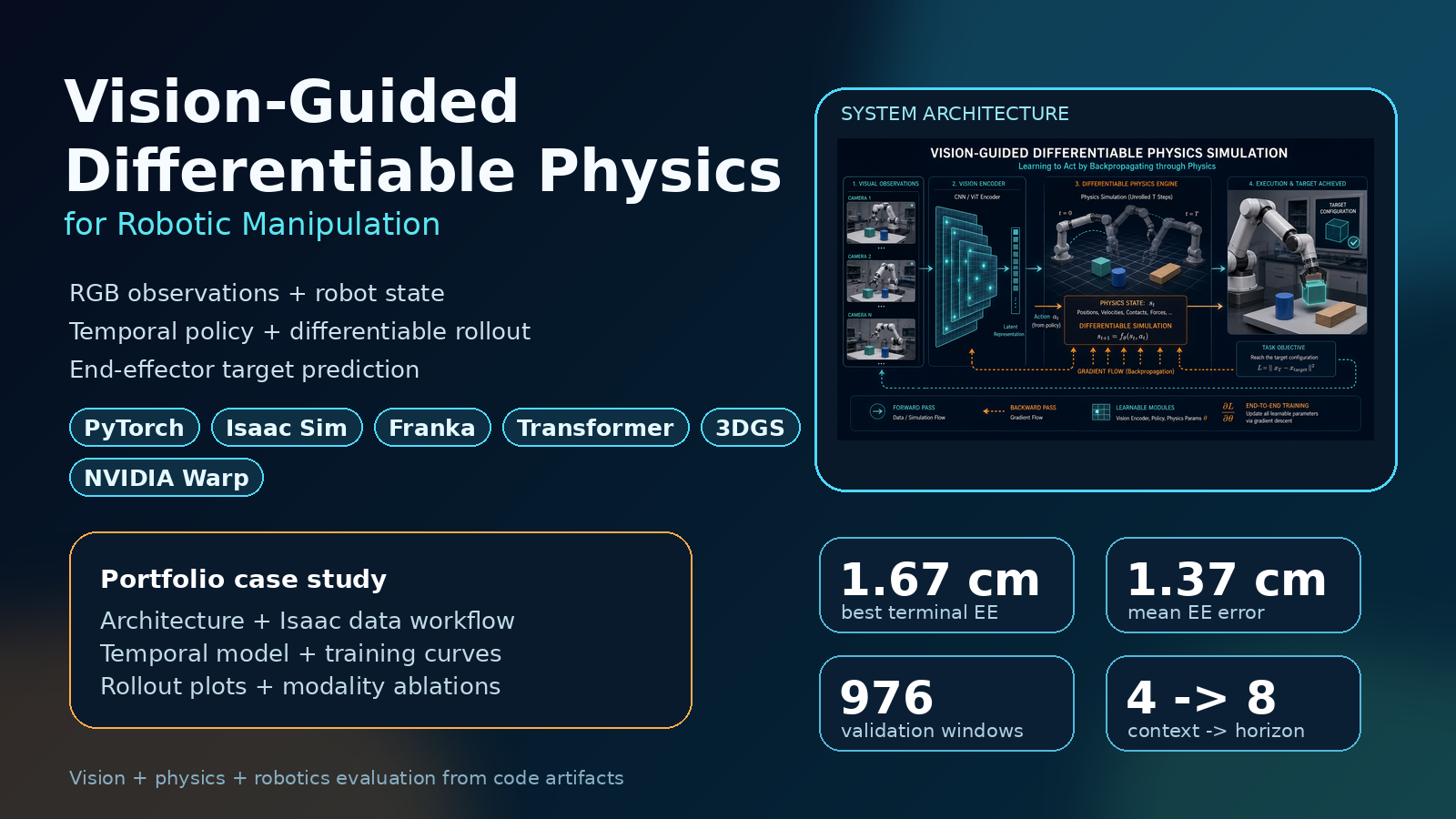
Vision-Guided Differentiable Physics for Robotic Manipulation
Robotics · 2025
A presentation-style robotics case study that connects RGB observations, robot state, temporal Transformer prediction, differentiable rollout losses, and Isaac Sim Franka data to learn multi-step manipulation behavior from visual context.