Highlights
- Built a complete vision-based landing prototype that combines platform detection, centroid and area extraction, PI alignment control, and timed landing logic.
- Tracked a colored landing platform carried by a line-follower robot at speeds up to 0.2 m/s in indoor trials.
- Achieved more than 95% platform detection reliability, average tracking error below 8 pixels, and 80% landing accuracy within 5 cm over 10 trials.
- Designed the full hardware/software loop as a solo project, from robot setup and Simulink deployment to gain tuning and final evaluation.
Key metrics
Media
Tech stack
Problem and objective
Landing a drone on a moving platform is a compact but realistic autonomy problem: the system must perceive the target, estimate where it is, stay aligned while both bodies move, and trigger descent at the right moment.
This project built an indoor version of that problem using a Parrot Mambo Minidrone and a small line-follower robot carrying a colored landing platform. The objective was to make the drone detect the platform with its downward camera, center itself using visual feedback, and land near the end of the track.
System overview
The system has three hardware components: the Parrot Mambo drone, a line-follower ground robot, and a lightweight colored platform mounted on the robot. The drone observes the platform from above and uses image features to guide alignment and landing timing.
The software stack was implemented in MATLAB/Simulink so camera capture, image processing, control generation, state-machine logic, and deployment could be handled in one prototyping environment.
- Camera input: downward-facing drone camera observes the moving colored target.
- Perception: HSV-style thresholding creates a binary mask for the landing platform.
- Feature extraction: centroid gives image-plane alignment error; segmented area gives a rough distance/descent-readiness cue.
- Control: PI alignment commands keep the platform near the image center.
- Landing: a state machine manages takeoff, tracking, descent, and touchdown.
Vision and control approach
The perception pipeline converts the downward camera image into a thresholded platform mask, then extracts centroid and area measurements. The centroid is used as the main feedback signal: if the platform drifts away from image center, the controller corrects lateral motion and yaw to bring it back.
The landing decision uses an additional timing layer. The drone remains in tracking mode until the target is centered enough and appears large enough in the frame. A lead-distance estimate based on line-follower speed and drone descent rate then triggers landing near the end of the track.
Results
The prototype worked reliably in a controlled indoor setting. In moving-platform trials, the drone kept the platform near the image center while the ground robot moved at speeds up to 0.2 m/s.
Across 10 runs, the system achieved more than 95% platform detection reliability, average tracking error below 8 pixels, and 80% landing accuracy within 5 cm of the target endpoint. The strongest part of the system was the vision pipeline: the colored platform was detected consistently in most test conditions.
Failure modes and engineering lessons
The difficult part was not simply detecting the platform; it was landing at the right time while the platform was still moving. Lighting changes, floor reflections, and platform appearance changes could disturb the color mask, while aggressive gains could make hover behavior oscillatory and reduce touchdown repeatability.
The project reinforced a core robotics lesson: performance depends on the full sensing-to-action loop. A working vision block is only useful when camera timing, thresholding, controller tuning, state transitions, and physical robot motion are all consistent.
My contribution
This was a solo project. I assembled and tested the line-follower robot, mounted the landing platform, built the image-processing pipeline, extracted centroid and area measurements, tuned the PI controller, created the landing state machine, deployed the Simulink model, and ran the experiments.
Next steps
- Add adaptive thresholding to improve platform detection under changing lighting and reflections.
- Estimate ground-robot speed online instead of depending on a fixed speed assumption for the descent trigger.
- Use a more predictive controller to reduce delay during moving-platform tracking.
- Add direct communication between the drone and ground robot so landing decisions can use both vision and platform state.
- Upgrade the landing target with stronger visual markers instead of relying only on platform color.
Related projects

Automated Goalie: Ping Pong Ball Trajectory Prediction System
Robotics · 2025
A closed-loop robot-learning prototype that detects a ping pong ball, estimates its 3D motion, predicts the landing point, and rotates a servo-driven blocker in real time on a Raspberry Pi-based hardware setup.
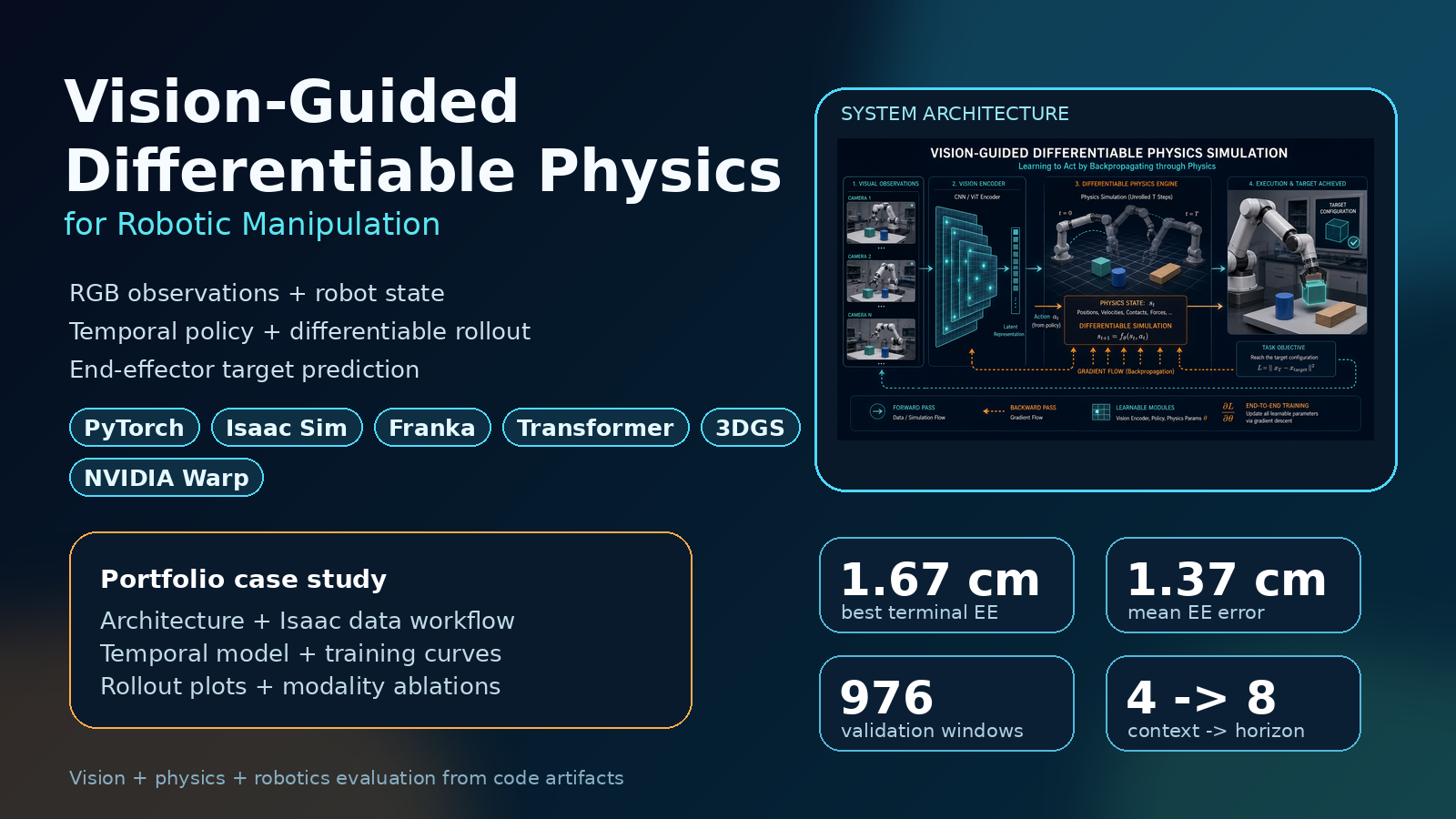
Vision-Guided Differentiable Physics for Robotic Manipulation
Robotics · 2025
A presentation-style robotics case study that connects RGB observations, robot state, temporal Transformer prediction, differentiable rollout losses, and Isaac Sim Franka data to learn multi-step manipulation behavior from visual context.